云试剂-科学材料城 / 2018-07-03
1等倾干涉测量的基本原理
1.1平面等倾干涉测量理论
以玻璃平尺干涉的光路图为例子,来介绍等倾干涉的测量原理。
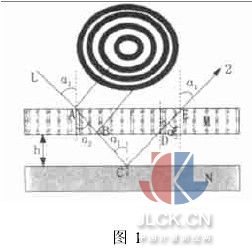
图1为玻璃平尺等倾干涉的光路图。M为标准长平晶,N为被检玻璃平尺。入射光L在长平晶M的上表面A点处分成两支,一支是反射光1,另一支为折射光。折射光通过长平晶进入空气,形成光线2。由于1和2两束反射光具有相干光的特征,因而在空间产生干涉现象,如果用一个望远系统观察,那么在物镜焦平面上可以观察到由同一锥角的光锥构成的一个圆环,这种干涉称之为等倾干涉。干涉环的变化即反映了被测平尺工作面与标准长平晶之间空气层厚度的变化。当长平晶工作面平面度无误差时,空气层厚度的变化量就为被检玻璃平尺的平面度。
1.2等倾干涉测量理论的数学表示
如果两束反射光的波面振幅分别为:
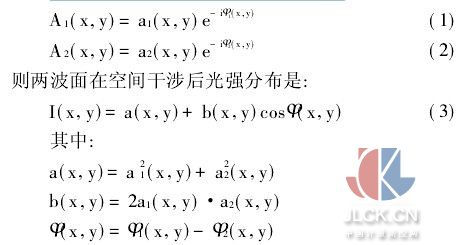
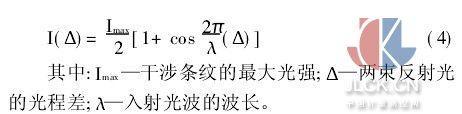
当两束反射光的光强相等时,形成的干涉条纹的强度与光程差之间的关系为:
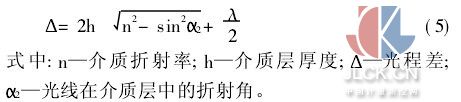
由光学理论知识可知,光程差与反射层介质厚度关系如下:
如果不考虑半波长,且当α2角很小时,(1)式可以变为:

因此通过测量与α2角直接相关的干涉条纹变化,进而推断出空气层厚度h的变化,得到被测量件表面的平面度。
2数字图像处理技术的应用
2.1系统的硬件设置
图2(a)给出了检测系统的光路简图,图2(b)给出了检测系统框图。
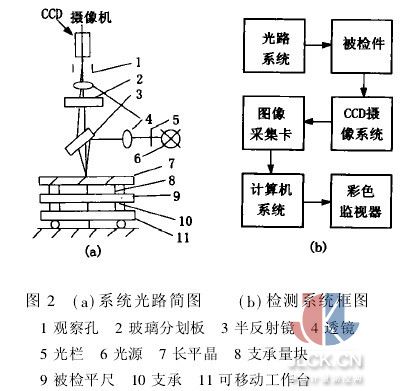
如图2(a)所示,单色光源6发出波长λ为0.5896μm的黄光,经过一系列的光学元件和标准平晶后,在标准平晶和被测平尺9之间的空气层上下两表面反射,形成两束相干反射光,反射光在CCD的成像面上出现明暗相交的等倾干涉条纹。
如图2(b)所示,被测件通过光路系统,在CCD的成像面处形成等倾干涉条纹,干涉条纹通过图像采集卡采集,并送入计算机处理,得到某一被标记的干涉条纹的直径。当被测件上各点顺次通过光照区的斑点,CCD视场反映为直径不断变化的干涉环,如果记录某一被标记的干涉环直径的变化值,并对这些值进行数据处理,就可以得到被测量面的平面度。
2.2干涉条纹的数字图像处理
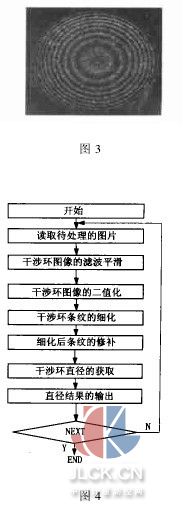
因为在等倾干涉测量中,获得干涉条纹直径的变化量是整个测量的关键。在测量以前,要依据检定规程JJG740―1991调整、找正仪器和被检平尺,并移动工作台直到平尺首尾两端的干涉环变化小于1个环为止,此时视场中出现的干涉环图像如图3所示,干涉环条纹的数目应在4环以上10环以下为佳。
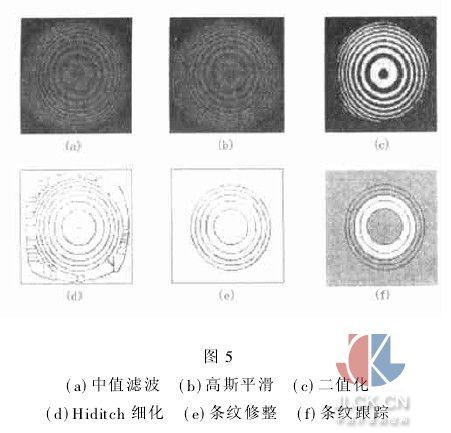
从CCD摄像机中获取的干涉条纹图像被存储为Windows位图格式,以便于随后的分析处理。由公式(3)可知,干涉条纹的灰度沿干涉圆环中心直径方向成余弦分布,因此在相邻的条纹之间没有明显的界限,要直接获取条纹直径比较困难,必须对条纹图像进行数字化处理,最终得到由单一像素组成的条纹细化图像。对获取的干涉图像进行数字图像处理的基本步骤流程图如图4所示,具体说明如下。
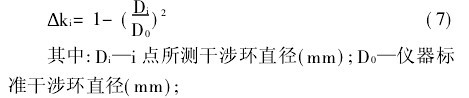
笔者采用中值滤波的方法去噪,用高斯模板对图像进行平滑处理,经过平滑处理以后的图像,在进行后序的细化处理时,可以避免短枝、断点等缺陷的出现,提高细化质量。在对图像进行二值化处理时,基于干涉图上亮暗条纹之间的灰度变化,采用Yatagai 5×5条纹极植检测法进行处理,可以获得较细的条纹骨架。由于等倾干涉条纹是一系列同心圆环,因此采用Hilditch细化算法对二值化后的图像进行处理,可以获得好的细化效果。细化以后的条纹图像往往存在错误的条纹或其它缺陷,如间断、分叉等,影响条纹特征值的提取,所以还要对条纹图像进行修整,这种修整过程可以通过鼠标用人机交互的方式完成。
基于上述数字图像处理理论,笔者对用CCD采集到的原始图像进行了处理,处理效果如图5所示。以图3为待处理的原始图像,该图像经过中值滤波处理后如图5(a)所示;然后对其进行平滑处理,其效果如图5(b)所示;再用Yatagai 5×5条纹极值检测法对图像二值化,得到图5(c)所示的效果;又经过Hilditch细化处理后如图5(d)所示;最后对图5(d)进行条纹休整,得到图5(e)的处理结果。一幅条纹图像经过去噪、平滑、二值化、细化、修补等基本的数字图像处理以后,就可以进一步提取条纹中心信息,获取条纹位置的坐标值,进而得到条纹直径。
2.3条纹位置的跟踪
等倾干涉测量是以条纹的变化量为测量对象的,条纹的变化量不仅包含整数倍条纹变化量而且包括小数倍的条纹变化量,因此获得条纹的整数倍与小数倍变化量,是等倾干涉测量的关键。在图2(a)所示的光路简图中,当工作台11移动,使被测件上各点依次通过光照区的斑点,就可以得到一系列变化的干涉条纹图像。假设被测件上通过光照区的各点依次标记为0,1,2……那么就应当获取n幅不同的干涉条纹图像。在这n幅图像中必然有一条干涉环始终会出现在CCD的视场内,这条干涉环就成为要跟踪和测量的环.
一般情况下,每隔5mm测量一个点,并采集图像时,被跟踪的干涉环的变化小于1个环,因此可以开出一个环形的跟踪窗口,将被跟踪环套入其中。当被检平尺的0点处于光照区时,窗口的大小就被确定下来,其内径和外径分别近似于与被跟踪环相邻的两个干涉环直径,如图5(f)所示。然后只对每30mm间隔获取的图像进行分析,获取测量窗口内的干涉环直径就可以了。假设这条环在不同图像中的直径为Di,则根据公式(7)求得干涉带级数Δki:
然后再按式(8)求出被检平尺工作面各测点对两端点连线的偏差Fi。
2.4条纹直径的获取
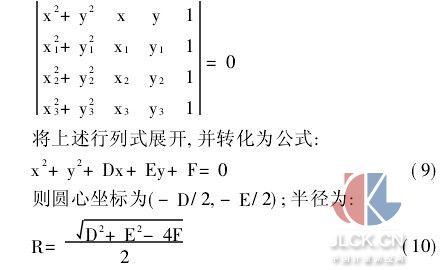
经过一系列数字图像处理以后的圆环干涉条纹其条纹宽度为1,通过获取条纹上点的坐标值,按三点定圆的方法求解出环的直径,其数学表达如下:
已知不在同一直线上的三个点的坐标值分别为:P1(x1,y1),P2(x2,y2),P3(x3,y3),过这三点的圆的方程为:
3测试实验及结论
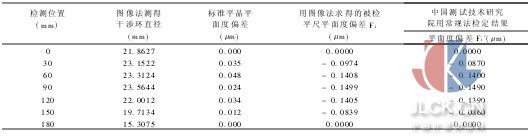
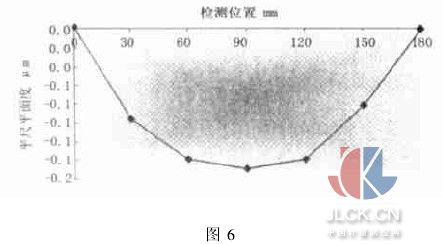
用该测试系统对一长度为200mm的平尺的平面度进行测量,标准平晶选用210mm的长平晶。测量点间隔5mm,得到各个测量点干涉环的直径值,具体数据以及与上级计量机构的检定结果对比见下表。按式(8)求得平尺各测量点对两端点连线的偏差,最后得到平尺的平面度误差为0.1499μm,如图6。
通过测试实验可知,将数字图像处理技术应用于等倾干涉测量领域是十分可行的,而且用本文提出的图像处理方法以及条纹跟踪方法,可以较准确地得到干涉条纹的变化量,同时处理速度可以得到保证。本设想还在进一步的完善中,如果成功,将会有较广阔的市场应用前景。
原始的干涉图像含有不同的灰度信息和噪声,为便于测量干涉环的直径,必须先对图像进行滤波平滑处理,然后通过图像二值化将图像的灰度信息变成只有0和255两种,以降低图像数据的冗余量。二值化以后的条纹图像骨架宽度往往大于一个像素,必须对这样的条纹进行细化使条纹宽度变成一个像素,这样才能提高条纹位置坐标的判读精度。
摘自:中国计量测控网
------------------------------------------------------------------------
本网站销售的所有产品仅用于工业应用或者科学研究等非医疗目的,不可用于人类或者动物的临床诊断或治疗,非药用,非食用。
© 2012-2024 东莞市乔科化学有限公司 版权所有,并保留所有权利。 科学粮草官热线: 4006226992 E-mail: qiaosun-100@163.com







