云试剂-科学材料城 / 2018-07-03
1引言
光弹性力学是应用光学的基本原理,结合力学的理论,通过数学工具的推演,以实验为主要手段去研究结构物中的应力、应变和位移等力学量的一门学科。它具有全场性、可视性及非接触式测量等特点,能较直观地反映出受载物体内部的受力状态。
光测力学作为解决工程实际问题的一个重要手段,光测数据与图像信息的自动化采集与处理,是光测力学现代化的重要标志之一,也是提高光测力学方法测试精度与速度的关键之一,已成为光测力学研究中的一个重点。
2原理与内容
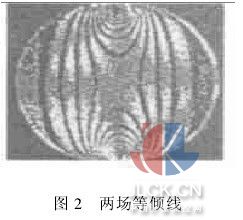
在光弹性力学中,等差(色)线和等倾线条纹是光弹性应力分析最基本、最有用的信息。目前,等差线的全场实时测绘方法已十分成熟,但是,等倾线的全场同时实时测绘却是光弹性力学实验一直未解决的难题。现在国内外所有的普通光弹性系统,在测取等倾线时,都是靠一次同步旋转起偏镜和检偏镜来实现的。每旋转一次起偏镜和检偏镜,在应力光图上只能显现一条对应于某主应力方向的等倾线,然后再徒手描绘或拍片,获得等倾线数据。这种方法费时、费力,精度难以保证。本文所介绍的全场光弹性自动检测方法,可以获得同时含有的两条等倾线和等差线的光弹性应力光图,其等倾线的分离是在同一幅应力光图上进行的。这样就缩短了图像采集和处理时间,处理精度也有很大提高。
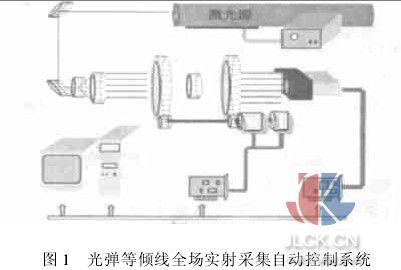
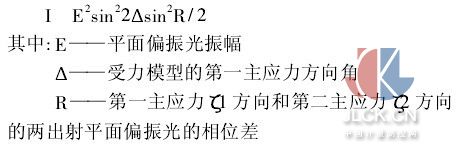
全场光弹性等倾线自动测量装置主要由光学部分、机械部分及电器电子部分组成,系统的基本结构如图1所示。光学部分包括激光光源、各类反射镜、扩束镜、准直镜及起偏镜、检偏镜等,主要利用光弹性材料的光弹效应(暂时双折射效应)及相似定律获取研究对象的等差线、等倾线,以研究对象内部的应力状况。根据双折射效应,当把平面应力模型置于平面偏振光场中,光弹性偏振系统的光强可以表示为:
在垂直于检偏镜偏振轴的主应力方向上的点,将没有光出射。所有的这些点组成黑色条纹,在条纹上的所有的点都有相同的主应力方向,这样的条纹称之为等倾线。当主应力方向垂直于偏振轴的方向时出现等倾线,一旦同时转动等差线和等倾线时,将只会观察到第一主应力方向的等倾线。因此,传统的测量机构不能同时探测到全场的等倾线而只能一个一个地手工探测。
本系统中机械传动机构与旋转编码器所组成的等倾线全场检测装置的旋转由交流伺服电动机驱动,伺服控制系统根据人机界面及实时过程控制程序的指令,可对电机的转速、转角(对应于旋转编码器的输出和偏振轴的倾角)及转矩进行控制。
在系统的初始阶段,微机系统向伺服电路发出指令,打开电机伺服控制触点,并进行零度倾角寻位。寻位确定后初始内存中的相关参量,加速电机使之全速运行,待电机转速稳定后,相对应的光脉冲时间间隔就稳定下来;在曝光控制脉冲及相应的定位脉冲控制下,数字照相机实现,一个周期中连续曝光取像,在计算机内设定的相机帧存体分区内采集一帧多场的图片。图像的采集方式采用人工预设定――全自动采集和在人工干预的情况下半自动采集以及全手动采集三种模式进行。操作人员可以根据特定的需求,有目的地选择拍摄不同的等差线、等倾线图集。图像卡将采集到的图像输送到计算机PCI总线上,可以由硬盘存储下来并显示在图像显示器上。
微机工作站用于上述过程的监控,监控程序用VC++语言编写,工作在WinNT平台上,全部软件内容包括:
1.硬件控制和数据采集部分;主要完成对全场光弹性等倾线实时采集过程的计算机控制;对伺服电机进行转角/速度闭环反馈控制。微机对运转过程进行监控和计算,稳定电机转速,确定曝光时间,实时中断处理采集请求,使用电子快门器件拍摄到转动一周内任意指定的与不同角度相对应的等倾线、等差线图像,保证采集到更加清晰的不同角度主应力方向的等倾线的图像。
2.图像处理部分;包括:图像滤波,图像增强与均衡化,图像压缩,等差线、等倾线分离提取(边缘探测、中心线提取、拟和及细化)。
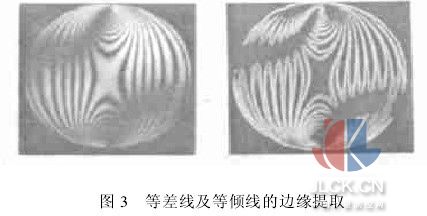
等差线和等倾线边缘检测、分离提取部分以小波技术作为主要的应用手段。实践证明,基于二进小波变换的处理方法,由于其提供了信号多尺度分析方法及变换不破坏信号在时间域上的平移不变性,适合不同尺度下的奇异点和边缘检测,并具有抑制噪声的作用。
中心线的细化就是求出等倾线的骨架,图像的骨架是描述图像的几何及拓扑性质的重要特征之一,也是计算受载荷物体内部应力场的依据。目前等差线的光学细化方法已经比较成熟,但需要复杂的光学设备和光路,操作也需要很多经验积累;而等倾线的细化工作则一直依赖手工,所以必然造成人为误差,这正是目前许多学者努力开展计算机识别工作的原因。
细化较为常用的是绝对中心线法,此方法首先将图像按照一定的阈值进行二值化,对所得黑白二值图像进行分析处理,取等倾线对应的面积的中心点为输出结果,汇总后可迅速地得到完整的等倾线。但此法亦有其明显的缺点,首先是受噪声的干扰影响特别大,其宽度受等差线的连续干扰且不易根除;其次由于等倾线是按弧线分布的,用不同的窗口及窗口倾角所得等倾线有很大差别;最后,所得的细化等倾线实际上是其几何中心线,与物理意义上的等倾线有一定差别,所以必须采用提取光学中心线的方法进行细化。
基于光学中心线的等倾线细化工作多以灰度变化为依据,结合一阶或二阶导数变换组成。实际的等倾线灰度剖面主要有两种:脉冲状和屋脊状。脉冲状主要对应引力集中区或条纹级数很多时的细条纹,而屋脊状对应纹理级别较稀松的情况。脉冲状条纹灰度变化快,可以用导数的过零值来检测中心线,也可用二阶导数的幅值进行监测。屋顶状的条纹剖面可以看作是将脉冲区域的底部展开得到的,所以它的一阶导数是脉冲剖面的一阶导数的上升沿和下降沿展开得到的,同样展开脉冲剖面的二阶导数可以得到层脊剖面的二阶导数。通过检验屋脊装剖面的一阶导数的过零点就可找到光学中心线。此外,数学形态学的发展也为我们提供了基于形态细化处理的理论与方法,与传统的计算模式相比,此法对等差线、等倾线密集交叉的情况有很大的帮助。
3小结
光测方法和图像信息的自动采集与处理相结合,可使光测力学法优点更加明显,如测试精度高,整个应力分析过程速度快,效率也能得到大大提高。在实际情况下,加力机构是比较庞大与笨重的,要求我们必须采取分离的传动结构,即起偏镜与检偏镜分别转动的机制,此时必须采取两套测角线路,分别计算起偏镜与检偏镜的绝对转角,并控制两镜头在偏振光轴保持正交的前提下同时到达需要的偏角,进而触发曝光脉冲。另外,基于模糊理论的方法也将是本仪器进一步开发与深入的方向。
摘自:中国计量测控网
-------------------------------------------------------------------------
本网站销售的所有产品仅用于工业应用或者科学研究等非医疗目的,不可用于人类或者动物的临床诊断或治疗,非药用,非食用。
© 2012-2024 东莞市乔科化学有限公司 版权所有,并保留所有权利。 科学粮草官热线: 4006226992 E-mail: qiaosun-100@163.com







